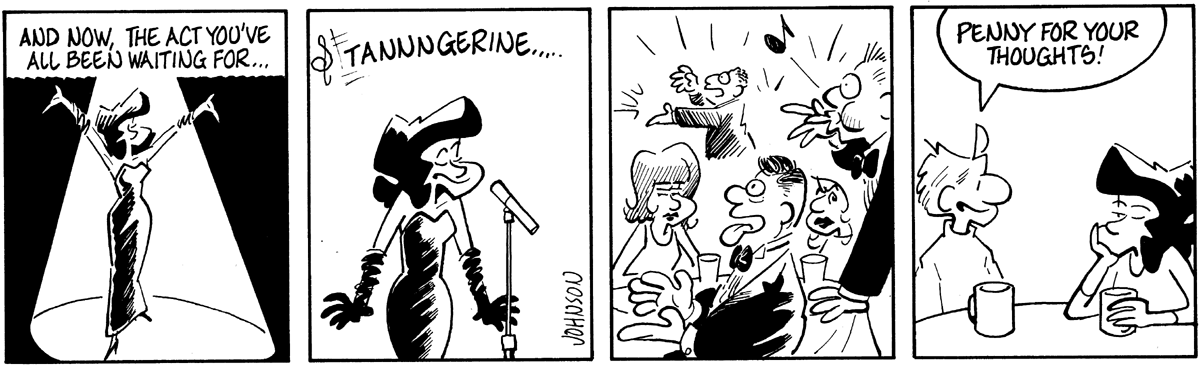

This series from 1998 is one of my all-time favorites. It’s appeared here before but not recently. It was inspired by a recent concert I had attended in a renovated small-town theater, an appearance of the “Tommy Dorsey Band.” It was, of course, a pale and threadbare reincarnation of the famous group from the big-band era, but they put on a good show. They had a young female singer who, when she wasn’t singing, demurely sat toward the back of the stage in a folding chair with a shawl over her shoulders. When a number called for her services, she would shed the shawl and, in a low-cut dress not unlike Janis’, belt out the requisite tune in arresting fashion. She was quite spell-binding, really. Obviously, she made an impression on me. And she did sing “Tangerine.”





33 responses to “Such Are the Dreams”
Thanks so much
Thank you
??????????? ?? ??? ?????? ???? ??????? ????????? ??? ??? Apex Legends
lolita girls cp pthc
https://m2.tc/P91p
?????, ??? ?????? ?????, ???? ?????
???????? ?????? – ??????? ????????? ????????? ????? ?? ?????? ?????????????? ?? ?????????? ?????, ???????.
??? ????????? ??????????????? ? ????? ??????????? ??????????.
+7(4862)25-54-37